陀螺仪延迟修复器是一款系统辅助修复工具,可实时监控陀螺仪的多轴数据,通过精准分析快速定位设备故障,不仅能检测出陀螺仪是否存在异常,还能明确故障类型与具体位置,为修复提供精确依据。
陀螺仪延迟修复器基于历史数据学习分析,可提前预测陀螺仪可能出现的故障,并自动生成对应的修复方案。同时具备广泛兼容性,无论是消费级陀螺仪传感器还是工业级高精度设备,都能实现高效检测与修复。
1、打开软件后,阅读弹出的隐私协议,无异议即可点击进入下一步。
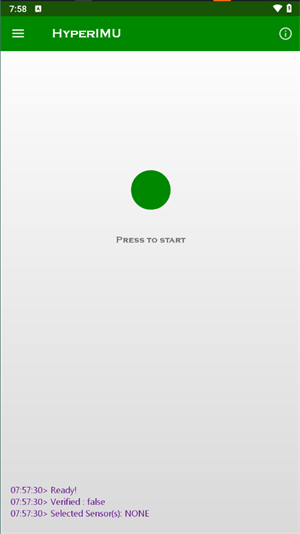
2、按系统提示触摸界面中的绿色圆点,完成初始操作响应。
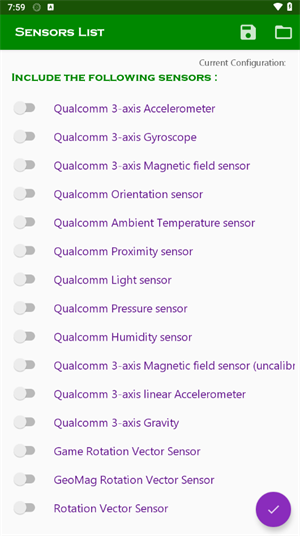
3、在选项列表中勾选需要检测的项目。
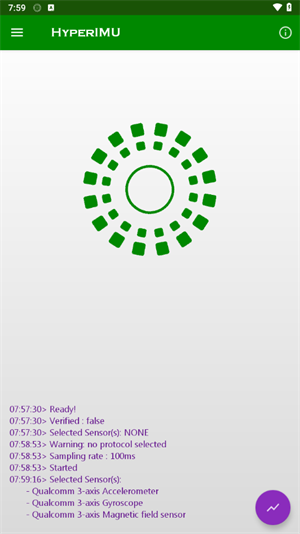
4、系统将自动开始陀螺仪数据检测与校正,等待进度条完成即可。
1、可在复杂环境下稳定工作,确保陀螺仪检测与修复过程不受干扰。
2、针对手游场景提升帧率稳定性,减少卡顿掉帧,优化3D画面流畅度。
3、在大型3D游戏中优化陀螺仪响应速度,提升瞄准、转向等操作的精准度。
4、内置经验分享平台,支持用户互动交流陀螺仪使用技巧与游戏心得。
物体在旋转时,其旋转轴在不受外力影响的情况下,旋转轴所指方向不变。因此可以用来测量角位移或角速度。
1、核心工作原理:角动量守恒定律角动量守恒定律是指系统所受合外力矩为零时系统的角动量保持不变。角动量的定义:物体矢径和其动量的叉积
(1)矢量的计算:叉积和点积假设a、b为两个矢量,之间的夹角为θ,则点积:a · b = abcosθ(标量)叉积:a x b = absinθ(矢量,方向由右手螺旋定则决定,四指由a弯向b,大拇指方向即为叉积方向)
(2)角动量计算:物体矢径和动量的叉积r为矢径,数值为物体到旋转中心的距离,方向为旋转中心指向物体的方向矢量;p为动量,数值为物体质量与线速度的乘积p=mv,方向为线速度v的方向;以该图的方向为例,依据角动量公式,可以得到角动量L的方向为竖直向上
(3)陀螺的角动量守恒假设一个陀螺不受空气阻力(合外力力矩=0),陀螺与地面的接触面无限小(矢径=0),则角动量的合力矩为0,即角动量守恒。
2、陀螺仪的基本特性:定轴性、进动性
(1)定轴性当陀螺转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间中的指向保持稳定不变,即指向一个固定的方向;同时反抗任何改变转子轴向的力量。这种物理现象称为陀螺仪的定轴性或稳定性。
(2)进动性当转子高速旋转时,若外力矩作用于外环轴,陀螺仪将绕内环轴转动;若外力矩作用于内环轴,陀螺仪将绕外环轴转动。其转动角速度方向与外力矩作用方向互相垂直。这种特性,叫做陀螺仪的进动性。
3、测量的物理量
(1)角速度测量的物理量是偏转、倾斜时的转动角速度
(2)方向俯仰角(pitch):绕x轴旋转偏航角(yaw):绕z轴旋转翻滚角(roll):绕y轴旋转
4、核心参数通用参数(传感器)线性误差:传感器测量值与实际物理值之间的误差分辨率:可检测到的最小物理量单位采样频率:单位时间内的采样次数陀螺仪重要参数量程:为角速度单位(dps,degree per second)灵敏度(刻度因子):最小分辨的角速度灵敏度初始误差灵敏度动态误差非线性度:满量程的误差初始零漂零漂温度系数
5、惯性导航原理惯性导航利用陀螺仪和加速度计测量载体在惯性参考系下的角速度和加速度,并对时间进行积分、运算得到速度和相对位置,且把它变换到导航坐标系中,这样结合最初的位置信息,就可以得到载体现在所处的位置。
v1.0.0
游戏中不再闪退